Contexte & ObjectifsContext & Goals
Dans de nombreuses industries (assemblage, manutention, impression 3D, laboratoire), certaines tâches répétitives ou dangereuses nécessitent une intervention humaine constante. Pour réduire les efforts physiques, augmenter la précision et la sécurité, il est apparu opportun de développer un bras robotisé capable de manipuler des objets dans un environnement contrôlé.
In many industries (assembly, handling, 3D printing, laboratories), certain repetitive or dangerous tasks require constant human intervention. To reduce physical strain and increase precision and safety, it became necessary to develop a robotic arm capable of manipulating objects in a controlled environment.
Conception & RéalisationDesign & Implementation
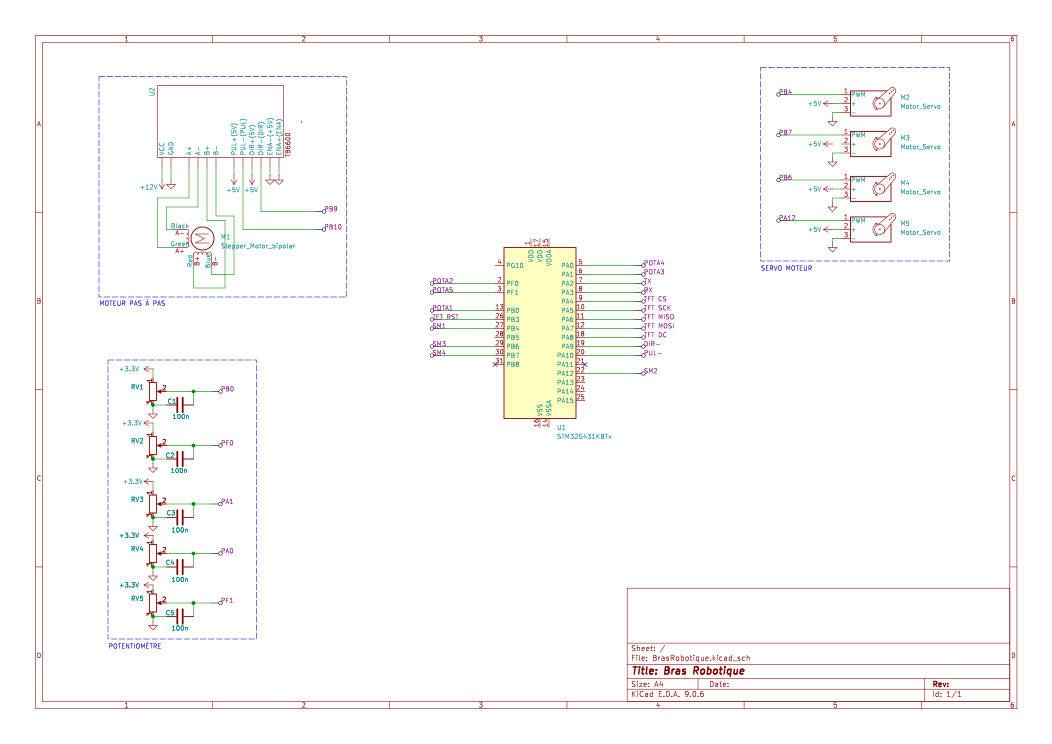
La position des servomoteurs est réglée à l’aide des potentiomètres, tandis que le moteur pas à pas est commandé par deux boutons poussoirs permettant de le faire tourner dans le sens horaire ou antihoraire. L’écran, non représenté sur le schéma, affiche la position de chaque moteur ainsi qu’une illustration de la position du bras robotique.
The servo motors are positioned using potentiometers, while the stepper motor is controlled by two pushbuttons, allowing it to rotate clockwise or counterclockwise. The screen, not shown in the diagram, displays the position of each motor as well as an illustration of the robotic arm's position.
Les étapes de développement :
Development steps :
- Étape 1 : conception du schéma sous
KiCad - Step 1: schematic design with
KiCad - Étape 2 : programmation du
STM32en C - Step 2:
STM32firmware in C - Étape 3 : modélisation du boîtier sous
Fusion 360 - Step 3: enclosure modelling with
Fusion 360 - Étape 4 : impression 3D et assemblage
- Step 4: 3D printing and assembly